24. A* Search
A* Search
02 A104 A Search V5
SOLUTION:
- A heuristic function provides the robot with knowledge about the environment, guiding it in the direction of the goal.
- A* uses the sum of the path cost and the heuristic function to determine which nodes to explore next.
- A* uses a priority queue as the data structure underlying the frontier.
- Choosing an appropriate heuristic function (ex. Euclidean distance, Manhattan distance, etc.) is important. The order in which nodes are explored will change from one heuristic to another.
As you saw in the video above, A* search orders the frontier using a priority queue, ordered by f(n), the sum of the path cost and the heuristic function. This is very effective, as it requires the search to keep paths short, while moving towards the goal. However, as you may have discovered in the quiz - A* search is not guaranteed to be optimal. Let’s look at why this is so!
A* search will find the optimal path if the following conditions are met,
-
Every edge must have a cost greater than some value, \epsilon , otherwise, the search can get stuck in infinite loops and the search would not be complete.
-
The heuristic function must be consistent. This means that it must obey the triangle inequality theorem. That is, for three neighbouring points ( x_1, x_2, x_3 ), the heuristic value for x_1 to x_3 must be less than the sum of the heuristic values for x_1 to x_2 and x_2 to x_3 .
-
The heuristic function must be admissible. This means that h(n) must always be less than or equal to the true cost of reaching the goal from every node. In other words, h(n) must never overestimate the true path cost.
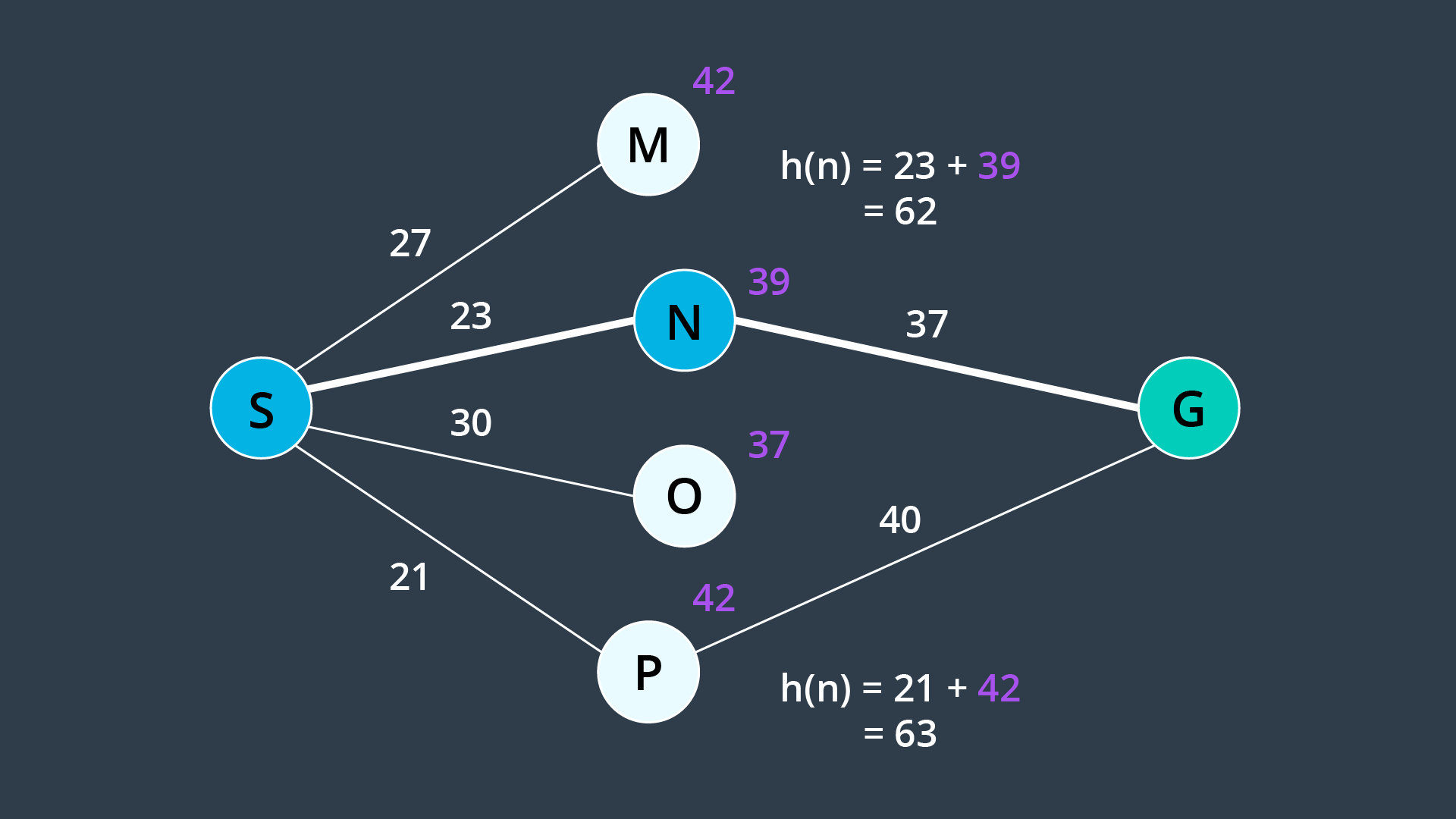
To understand where the admissibility clause comes from, take a look at the image below. Suppose you have two paths to a goal where one is optimal (the highlighted path), and one is not (the lower path). Both heuristics overestimate the path cost. From the start, you have four nodes on the frontier, but Node N would be expanded first because its h(n) is the lowest - it is equal to 62. From there, the goal node is added to the frontier - with a cost of 23 + 37 = 60. This node looks more promising than Node P, whose h(n) is equal to 63. In such a case, A* finds a path to the goal which is not optimal. If the heuristics never overestimated the true cost, this situation would not occur because Node P would look more promising than Node N and be explored first.
As you saw in the image above, admissibility is a requirement for A* to be optimal. For this reason, common heuristics include the Euclidean distance from a node to the goal (as you saw in the video), or in some applications the Manhattan distance. When comparing two different types of values - for instance, if the path cost is measured in hours, but the heuristic function is estimating distance - then you would need to determine a scaling parameter to be able to sum the two in a useful manner.
If you are interested in learning more about heuristics, visit Amit’s Heuristics Guide on Stanford’s website.
While A* is a much more efficient search in most situations, there will be environments where it will not outperform other search algorithms. This happens if the path to the goal happens to go in the opposite direction first.
Variants of A* search exist - some accommodate the use of A* search in dynamic environments, while others help A* become more manageable in large environments.
Additional Resources
The following visualization is a great tool that allows you to draw your own obstacles, set your own rules, and perform search using different algorithms.
For more information on A* variants, take a look at:
MovingAI A* Variants
[Variants of A* - Stanford](
http://theory.stanford.edu/~amitp/GameProgramming/Variations.html
)
Take some time to investigate the efficiency of A* over BFS in different scenarios! And if you're feeling extra adventurous, research some of the other algorithms that are provided in the simulation and compare their results to those of BFS & A*.